
Laser Scanning
Despite the highly automated nature of modern manufacturing the painting of complex shapes is still a skilled labour-intensive, manual task. Examples are not hard to come by: the mass production of children's toys, for instance, is dominated by the Far East because low labour costs make hand-painting an economic process for millions of units a year.
In the West, hand-painting is expensive, but still used to add realism to the one-off prototypes that form a crucial part of product development. Indeed, although today's rapid prototyping (RP) technology can generate physical prototypes directly from 3D CAD models the process is not entirely automatic. Component models produced on RP systems still require a manual finishing process that smoothes, primes and paints the surface. Consequently, every prototyping facility has a low-tech backroom where components are laboriously painted by hand because automated image transfer technologies are currently too costly and inflexible to apply to small batches.
So, although the computer graphics technology exists to define the shape and appearance of almost any consumer product, physically reproducing a "photo-realistic" rendering of a 3D CAD design is problematic, requiring considerable manual input. While one can envisage that today's RP systems will eventually evolve into rapid manufacturing systems that can produce objects of any shape cheaply and quickly, from a wide variety of materials (e.g. plastic, metal, ceramic, etc), rapid "painting" technologies are only just starting to be investigated. In other words, despite an obvious future demand there appears to be little research underway into surface coating technology that can be digitally processed to change and enhance the appearance of manufactured objects. The research carried out here addresses this issue by investigating the applied optics, software and chemical coatings required to fully automate the process of reproducing digital texture maps on physical objects.
Project: 3D Digital Imaging
Description:
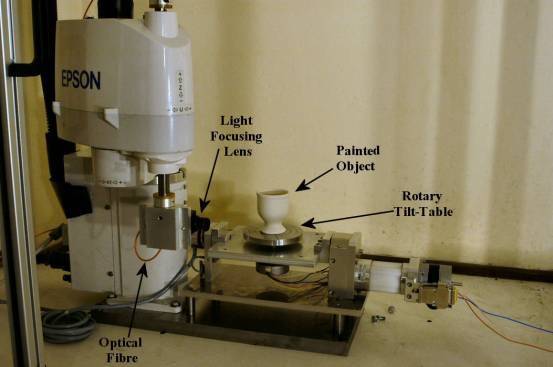
Essentially the system creates pictures by directing a light beam onto the surface of an object coated with photographic emulsion. In order to guarantee complete exposure of, potentially, every point on the surface, of any shape, the light beam is directed by a four-axis robot whose movement is coordinated with a servo-controlled, rotary, tilt-table (Figure 1).
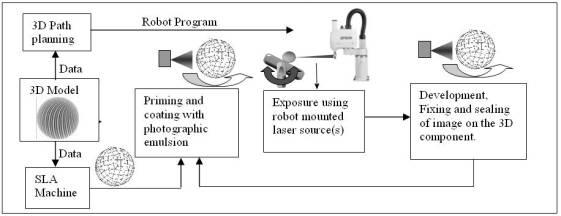 |
The robot's movement, the table's rotation and the exposing beam's intensity are all generated automatically by analysis of a VRML representation of the physical object's final appearance. It is anticipated that, in the short term, the technologies arising from the research could find commercial applications in the finishing of the typically monochrome components produced by RP systems. Longer term applications are expected in the "mass customisation" of consumer products, and the automation of many labour-intensive hand-painting processes.
The feasibility of the proposed Physical Rendering process (referred to as PhysRen) will be determined by:
- 1. The accuracy with which digital texture data can be related to physical coordinates and exposure intensity.
- 2. The ability to robustly generate exposure paths for hundreds of thousands of points directly from 3D models.
Early in the investigation it was established that the photographic emulsion adhered particularly well to ceramic materials. Consequently to enable repeated trial of the system painted ceramic mouldings have been reversed engineered to create a VRML representation. This has enabled unpainted copies of the same moulding to be used to support the development of the system.
The entire process takes place in a normal photographic darkroom under safelight conditions. After placing an unpainted model coated with photographic emulsion onto the tilt-table, the text file containing the points on the surface of the 3D object is read in by a C++ program which computes and varies, accordingly, the position of the robot hand, tilt and rotation angle of the table and the LED brightness.
A VRML representation of the painted test part was generated utilising a 3D scanning system which captured the points on the surface of the model together with their corresponding RGB value. The resulting point cloud is then output as a VRML file which is used to generate the robot path.
 |
Scope:
This research programme aims to: Firstly to develop a greyscale "painting system" that enables the physical reproduction of digital texture maps on arbitrary 3D objects by selectively exposing "pixels" of photographic emulsion with a robot mounted light source. Secondly to create a path planning algorithm, used to derive both the robot's movement and the exposure times directly from a VRML representation.

